

2015年5月,国务院印发《中国制造2025》通知,这是我国实施制造强国战略第一个⼗年的行动纲领。
工业机器人的主要矛盾在上游核心零部件,尤其是伺服系统、控制管理系统和减速器。
另一方面,是尚未成型的”制造强国“对进口零部件的严重依赖,以及由此而生的高企成本。
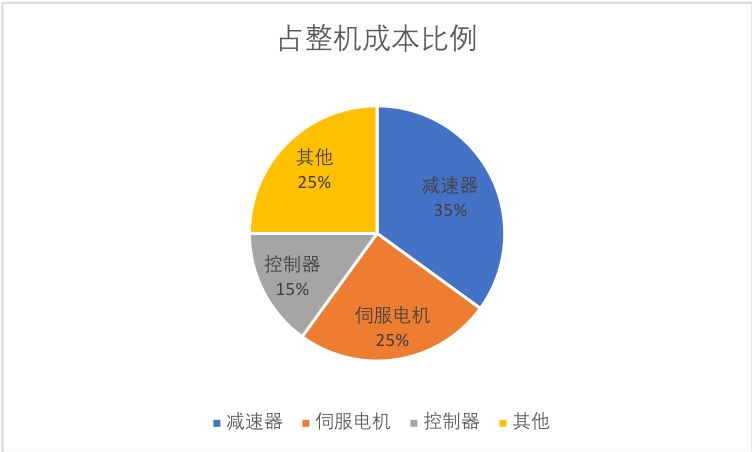
核心零部件伺服系统、控制管理系统和减速器之中,减速器占采购成本的份额最大(35%)。而三种核心零部件的进口量都占总购买量的75%以上。
减速器是机器人的核心零部件,相当于人体的关节部位。它是一种精密的动力传达机构,最大的作用是降低转速,增加转矩。
我国对工业机器人零部件的需求量居全球之首,且逐年递增。2016年全球工业机器人销量达29.4万台,其中中国销量9万台,占全球需求量的30%。中国产业信息网预计2017-2020年中国工业机器人销量增速为20%左右,而平均一套工业机器人需要配备5个减速器/伺服电机和1 套控制管理系统。据此推理,国产工业机器人精密减速器/伺服电机在2020年的需求量将近78万套。

现在最常用的精密减速器有两种,RV减速器(60%),和谐波减速器(15%)。而这两种减速器分别被日本的Nabtesco和Hamonica Drive垄断。
谐波减速器适用于20公斤以下的机器人。随着使用时间的增长,谐波减速器会产生一定的变形,效能会减弱。
RV减速器适用于20公斤以上的机器人,相较于谐波减速器,它的性能更好,但制造难度更大,成本更高。
RV减速器原理比别的类型减速器更复杂,它有两级传动装置——第一级渐开线圆柱齿轮行星减速机构 + 第二级摆线针轮行星减速机构。复杂的结构为其精准度和耐用性提供了保障。
核心零部件极度依赖进口。伺服系统、控制管理系统和减速器进口量分别达80%, 80%和75%。国内企业议价能力目前尚弱,购买减速机的价格是国外企业的价格的2~5倍,最终造成减速器在工业机器人中所占成本达到30%。
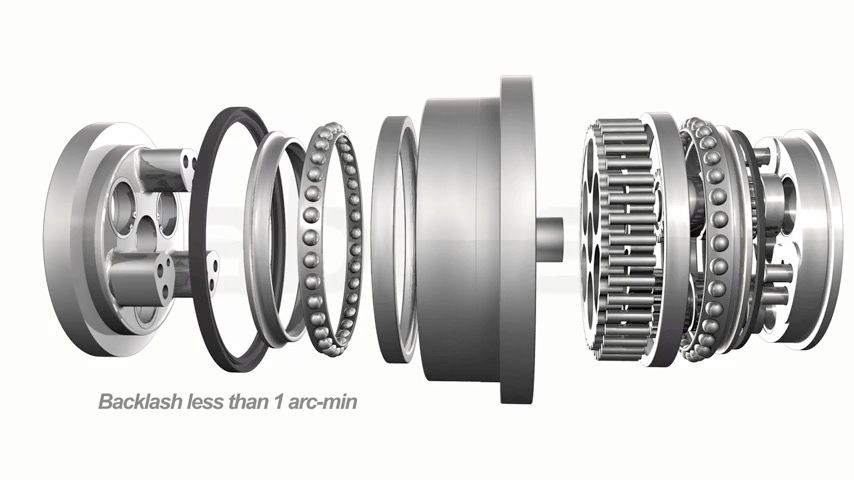
RV减速器采用过采用过定位结构,这种结构能大大的提升工件的局部刚度和定位稳定性,但同时它可能会导致定位干涉,工件或定位元件变形,误差增大的情况。因此RV减速器的制造对加工精度、配合度的要求非常高,基本都是μm级别。下图是RV减速其“关节”拆开后的各个部分。
日本的Nabtesco和Hamonica Drive两家公司,都是在上世纪50年代左右便已开始投入机器制造的研发,中国的起步则落后了几十年。近年虽有企业能制造出技术水平相当的核心零部件,但很难保证机器的常规使用的寿命。这同样与制造机器人时的精度有关。为了达到完美的匹配度,日本科研团队曾在实验室一点一滴地调试材料配比,不断地做对比实验。中国技术要达到相同的高度,第一步是要匠人的沉静,其次需要一些时间的积淀。精度不合适,那么机器人就更容易被磨损。因此尽管出厂时国产机器人能比肩国际,一段时间后,效能会下降。此外,由于生产核心零部件的机床成本也很高,国产零件也没有完全实现量产。销售机器人的利润难以填补采购成本的投入,机器人厂商没更多的资金注入研发技术。由此产生一个心痛的“研发资金不够—技术达标—销量不好—不能量产—制造成本高—研发资金不够”的恶性循环。
情况还可以更糟糕,着迷于国内强大的市场需求, 国外机器人厂商纷纷进入中国,积极布局长三角。为应对新崛起的国产品牌,外资厂商纷纷采取降价的手段进一步削弱国产机器人的市场竞争力。
2012《“十二五”国家战略性新兴起的产业发展规划》提出要重点发展“智能制造装备产业”;
2013工信部《关于推进工业机器人产业高质量发展的指导意见》 提出将发展工业机器人的重要地位;
2015工信部《关于开展 2015 年智能制造试点示范专项行动的通知》提出投资超过110 亿元在94 个示范项目,从政策层面上的支持上升至财政上的支持;
2015《中国制造 2025》,将智能制造确立为中国制造 2025 的“主攻方向”……
政策大力推动之下,许多地方规划起了机器人产业园。但产业园中的企业数目、规模都很小,难以形成聚集优势,存在盲目性和重复建设的现象。 工业和信息化部赛迪研究院发布的《中国机器人产业高质量发展白皮书(2016版)》提出了以下五点建议:
珍珠毕竟是沙粒经过时间的积淀的,直面不完美的现实,然后以可持续的方式日臻完善技术,不慌不急不懈怠,才是捷径。该走的路走了,该过的劫过了,也就修炼成佛了。
安信证券《人机一体化智能系统专题报告:从工业机器人产业链看人机一体化智能系统机会》,2016年7月


