

减速机是提高机械臂关节运行精度及扭矩的重要部件,主要由传动零件(齿轮或蜗杆)、轴、轴承、箱体及其附件组成。
通常,减速机可分为三大基本结构:①齿轮、轴及轴承组合;②箱体;③减速机附件。
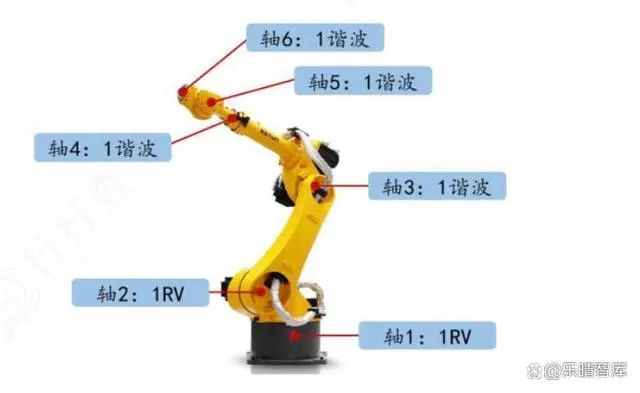
在发动机输出的动力不能直接满足低转速工作需求的情况下,减速机可以在原动机和工作机或执行机构之间起匹配转速和传递转矩的作用,进而达到降低转速、增加转矩的效果。以机器人应用为例,减速机能使伺服电机在恰当的速度下运转,精确地将转速降到机器人各部位需要的速度,提高机器人刚性的同时,能输出更大的力矩。
减速机也分为不一样种类,常用的减速机类型有:RV减速机、谐波减速机、行星减速机、摆线针轮减速机等等,以下为简单介绍。
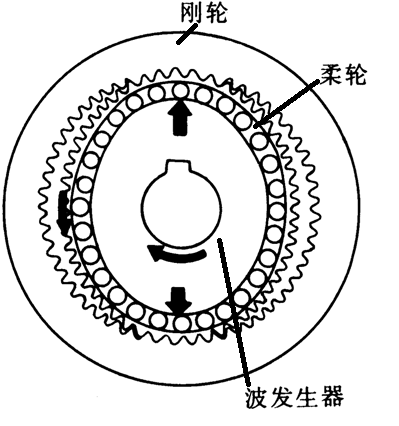
谐波减速机由波发生器、柔性齿轮、刚性齿轮三个基础构件组成,是一种靠波发生器装配上柔性轴承使柔性齿轮产生可控弹性变形,并与刚性齿轮相啮合来传递运动和动力的齿轮传动。其在能源电子设备、矿山冶金、交通运输、起重机械、石油化学工业机械以及医疗器械等方面得到日益广泛的应用,特别是在高动态性能的伺服系统中,采用谐波齿轮传动更显示出其优越性。 谐波减速机的优点有传动速比大、承载能力高、传动精度高、传动效率高、结构相对比较简单、体积小、重量轻及可向密闭空间传递运动等;缺点是柔性轮易产生疲劳损坏、转动惯量和起动转矩大以及加工制造难度大,工艺流程复杂。
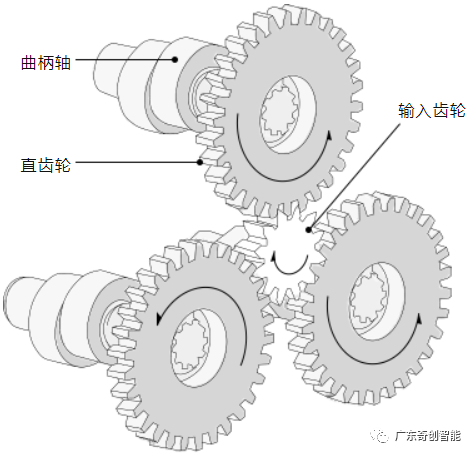
RV减速机由一个行星齿轮减速机的前级和一个摆线针轮减速机的后级组成,具有结构紧密相连,传动比大的特点。RV减速机在一定条件下能具有自锁的功能,是最常用的减速机之一。 RV减速机的优点是噪音小、能耗低;能承受较大的负载;拥有较高的减速比,有利于高精度的实现。但RV减速机受工艺和装配的影响比较大,对于齿轮的耐磨性和高刚性要求高,并且需要特殊的部件加工和精密装配技术。
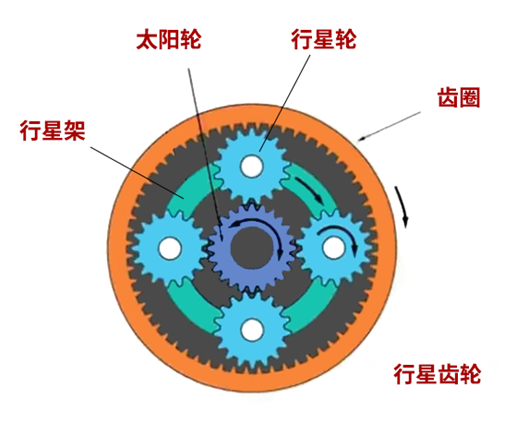
行星减速机可大致分为行星轮、太阳轮和内齿圈和行星架,行星轮会围绕太阳轮进行旋转,具体结构可参考下图3。 行星减速机能做到功率分流,具有多齿啮合独用的特点。行星减速机的体积比较小,重量轻但承载能力高,除此之外,它还有常规使用的寿命长、运转平稳的优点,较常用于起重、挖掘、建筑等行业。
摆线针轮减速机采用摆线针齿啮合、行星式传动原理,所以通常也叫行星摆线减速机。外齿轮齿廓为变态摆线,内齿轮轮齿为圆销,二者内啮合,摆线所示。 摆线针轮减速机的优点是体积小、重量轻;传动比范围大;传动较平稳,效率和精度都不错,而缺点是没办法承受大负载;拆装比较麻烦,
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。举报投诉

关注、星标公众号,不错过精彩内容素材来源:网络很多工程师都会接触电机、
作为现代化建设中必不可少的传动设备,被大范围的应用于国民经济的所有的领域。对
一,安装前的需要注意的几点:1.本机在使用前应对安装轴进行清理洗涤。并检查安装轴是否有碰伤、污物,若有应全部清除干净;2.
试验设计,由智能三相电参量测量仪、信号采集器、接口转换器、计算机和软件组成,配合试验台、测量变送器,现场采集转速、扭矩、电机参数等信号。
安装在一个比较平整然后稳定的平面上不管是底座还是基础坐,有排油槽和空气流通良好的地方。要是底座不稳定就会出现,电机在运动的时候产生
总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、
就是舵机的工作原理,舵机(英文叫Servo) 舵机主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。舵机要工作就要收到指令主可有动作,好比我们上班老板没有下达任务的时候
/ 伺服电机 / 检测设备 / 焊割设备 /喷涂装备 / 搬运装备 / 专用电线电缆 / 传感器 / 相关软件等服务型
的代表者,拥有着高精度,高效率的性能特性,同时稳定性,寿命,防护等级都是
齿轮数目的可用不同的商业用途。 有一个系统来进行分类,并按照不同的标准。有些方法流行的分类列举如下。 平行轴
的原理是什么,本文由锋桦传动设备(上海)有限公司 布!简单的讲,是利用各级齿轮传动来达到降速的目的.伺服
本帖最后由 24不可说 于 2018-9-25 13:17 编辑 1.减少、行星
的问题,是操控方法的问题,这样一些问题也是软件方面的。仍然归结为软件问题。所谓
的特点:外观设计轻薄短少,紧凑并轻量化,在运转平台上更有三大特性–低背隙、高扭矩、低燥音,能让马达能在更高更有效率的情形下运转,并减低其回馈的负载惯量
制造厂家已经在使用一种集光电码盘及旋转变压器功能为一体的混合式光电位置传感器,伺服电动机可与位置及速度检测器、制动器、
,其优点是空气来源方便,动作迅速,结构相对比较简单造价低,无污染,缺点是空气具有可压缩性,导致工作速度的稳定性较差,又因气源压力一般只有6kPa左右
的2015-2017年的需求量将达到31.98万套、35.8万套和40.1万套。2015-2017国内工业
的产业链分为上游核心零部件,中游本体和传感器等生产,以及下游的系统集成等。核心零部件是
、伺服系统、控制管理系统三部分,分别对应执行系统、驱动系统、控制管理系统,分别占成本的35%、25
装机容量将至少增加30万台。2004年-2014年,中国的工业机械器的保有量从0.71万台提升到18.94万台,保有量的全球占比从0.84%提升到
部分、输出部分。在输入轴上装有一个错位180°的双偏心套,在偏心套上装有两个称为转臂的滚柱轴承,形成H机构、两个摆线轮的中心孔即为偏心套上转臂
配有许多能够识别环境参数的ADM238LJR传感器,可以采集蒸汽成分、现场图像界面、障碍物等信息。该无线数据传输控制模块能够在上位
分别是DeltaTau的PMAC卡和Beckhoff的TwinCAT系统。2、
通常执行重复的动作,以完成相同的工序;为保证在生产中能可靠地完成工序任务,并
三个寻迹传感器完成的:在同一时间内三个寻迹传感器没有反馈,表示悬空,使
。3、我们想要理想的扭矩,要么要一个大的伺服,要么要一个小的伺服加一个
时,请务必严格按照下面的安装使用相关事项,认真的装配。第一步:确认电机和精密行星
主要包括:传输电机动力和扭矩;传输和匹配动力转速;调整应用端机械负载与驱动侧电机之间的惯量匹配;从内部结构看
广泛应用在各个行业领域中,那么我们在正常的使用时在噪音的处理方法上有什么技巧呢?行星
的噪音产生大部分是源于传动齿轮的摩擦、振动以及碰撞,怎样大大降低及减少
广泛应用在各个行业领域中,那么我们在正常的使用时在噪音的处理方法上有什么技巧呢?行星
的噪音产生大部分是源于传动齿轮的摩擦、振动以及碰撞,怎样大大降低及减少
广泛应用在自动化行业领域中,那么我们在正常的使用时应该掌握啥样子的使用技巧呢?行星
都以电磁电机作为关节执行器。由于电磁电机的转速高,当作为关节驱动时,不得不使用
一般用于低转速大扭矩的传动设备,把电动机。内燃机或其它高速运转的动力通过
的关键基础部件,包括:构成机械手传动系统、控制管理系统和人机交互系统,对桁架
是我国基础装备行业之一,下游应用包括起重运输、水泥建材、重型矿山、航空航用、
作为轴承、齿轮和传动部件制造业里的一个重要组成部分,承担起为国民经济各行业提供传动装置配套的重任。为我国起重运输、污水治理减、水泥建材、重型矿山、航天航空、
身上使用量b2b多的核心零部件,其制造成本高,生产难度大,目前国内只有少数几家企业具备RV
利用齿轮的齿数差来降低转速和增强扭矩,是工业领域的重要组成部分之一。日本哈默纳科HarmonicDrive
是一种用于低转速大扭矩的传动设备,利用齿轮的速度转换器,将电机(马达)的回转数
齿轮原理设计,主要由驱动轮、柔性轮、综合轮和刚性轮组成。柔性轮通过摩擦力传递力矩,综合轮产生弹性变形,从而实现
则由太阳轮、行星轮和内凸轮组成。太阳轮作为输入轴,行星轮通过行星架与太阳轮相


