

工业机器人的发展和应用,是我国制造业走向高端化和智能化的重中之重。目前中国工业机器人产业呈现“快速成长”和“国产替代”的双重重要特征。
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可接受人类指挥,也可根据预先编排的程序运行,现代的工业机器人还能够准确的通过人工智能技术制定的原则纲领行动。
主体即机座和执行机构,包括臂部、腕部和手部,有的机器人还有行路机构。大多数工业机器人有3~6个运动自由度,其中腕部通常有1~3个运动自由度。
驱动系统包括动力装置和传动机构,用以使执行机构产生相应的动作。控制管理系统是按照输入的程序对驱动系统和执行机构发出指令信号,并进行控制。

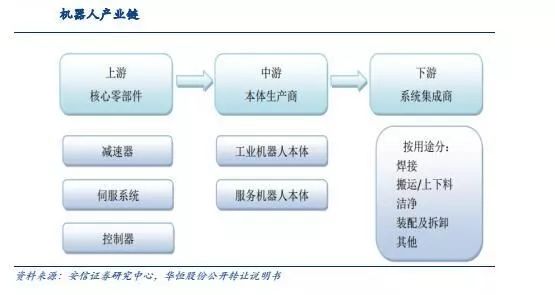
工业机器人行业上游是核心零部件,主要的是减速机和控制管理系统,这相当于机器人的“大脑”,中游是机器人本体,就是机器人的“身体”,下游是系统集成商,国内企业都集中在这个环节上。
工业机器人上游零部件行业主要是减速机、伺服电机、变频器、控制器等,其中减速器、伺服电机及伺服系统在工业机器人成本中所占比重较大,分别为39%,28%,本体制造占比为22%。
虽然减速机、伺服系统在工业机器人成本中所占比重较大,但国内减速机、伺服电机等关键零部件发展相对滞后,技术水平较低,产品稳定性差,与国外产品相比存在不少差距,导致国内工业机器人减速机、伺服电机等零部件主要依赖进口,国内企业工业机器人生产所带来的成本较高,竞争力较弱。
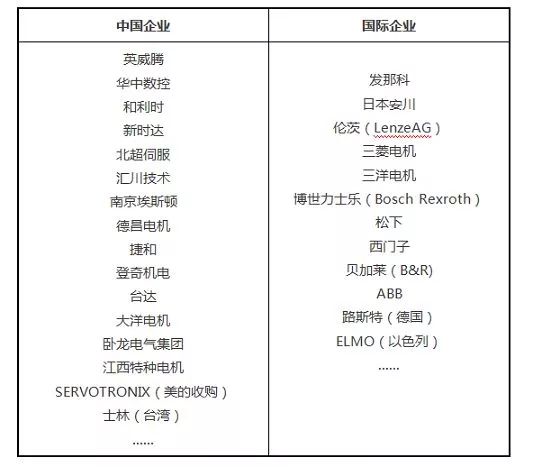
电动伺服驱动系统是工业机器人的必不可少的关键零部件,是利用各种电机产生的力矩和力,直接或间接地驱动机器人本体,以获得机器人的各种运动的执行机构,通常由伺服电机以及伺服驱动器组成。除了能进行速度与转矩控制外,伺服系统还能够直接进行精确、快速、稳定的位置控制。

2)起动转矩惯量比大,在驱动负载的情况下,要求机器人的伺服电机的起动转矩大,转动惯量小;
3)控制特性的连续性和直线性,随着控制信号的变化,电机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比,调速范围宽,能使用于1:1000~1:10000的调速范围。
5)能经受住苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能在极短的时间内承受数倍过载。交流伺服驱动器因其具有转矩转动惯量比高、无电刷及换向火花等优点,在工业机器人中得到普遍应用。
1)信号接插件的可靠性。国产伺服需要继续改进,而且接插件的小型化、高密度化也是趋势,与伺服电机本体的集成设计是个很好的做法,目前日系的伺服电机很多就是这样设计的,方便安装、调试、更换。
2)编码器的高精度。尤其工业机器人上用的多圈绝对值编码器,目前严重依赖进口 ,是制约我国高档伺服系统发展的重要瓶颈之一。编码器的小型化也是伺服电机小型化绕不过去的核心技术。纵观日系伺服电机产品的更迭,都是伴随着电机磁路和编码器的协同发展升级。
另外,国内的伺服系统的基础性研究缺失,包括绝对值编码器技术、高端电机的产业化制造技术、生产的基本工艺的突破、性能指标的实用性验证和考核标准的制定等等。这些都需要国内机器人行业的核心零部件企业去完善。
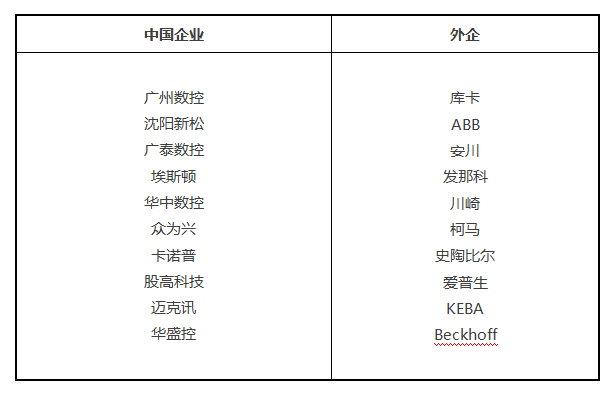
工业机器人控制器是机器人控制管理系统的核心大脑。控制器的主要任务是对机器人的正向运动学、逆向运动学求解,以实现机器人的操作空间坐标和关节空间坐标的相互转换,完成机器人的轨迹规划任务,实现高速伺服插补运算、伺服运动控制。
机器人控制器由机器人控制器硬件和机器人控制器软件组成。机器人控制器的软件部分是工业机器人的“心脏”,随着科学技术的发展,工业机器人从下位机到上位机的应用软件方面都有了不同程度的研究成果。
机器人轴数越多,对控制器性能要求也越高:机器人自由度的高低取决于其可移动的关节数目,关节数愈多,自由度越高,位移精准度也越高,其所使用的伺服电机数量就相对较多,即越精密的工业型机器人所用的伺服电机数量愈多。一般每台多轴机器人由一套控制管理系统控制,也代表着控制器性能要求越高。
控制系统的开发涉及较多的核心技术,包括硬件设计,底层软件技术,上层功能应用软件等,随技术和应用经验的积累,国内企业机器人控制器产品已经较为成熟,是机器人产品中与国外产品差距最小的关键零部件,国内机器人控制器所采用的硬件平台和国外产品相比并没有太大差距,差距主要在控制算法和二次开发平台的易用性方面。
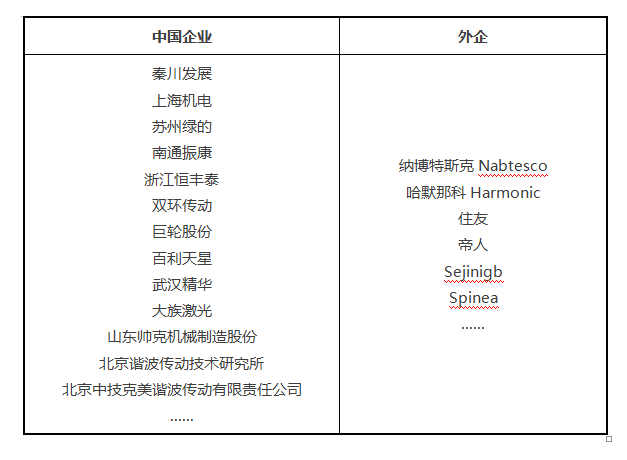
工业机器人核心部件减速器是物理运动的核心,机器人的速度、精度都与减速器有关,工业机器人使用的减速器主要包含:谐波减速器、RV减速器。
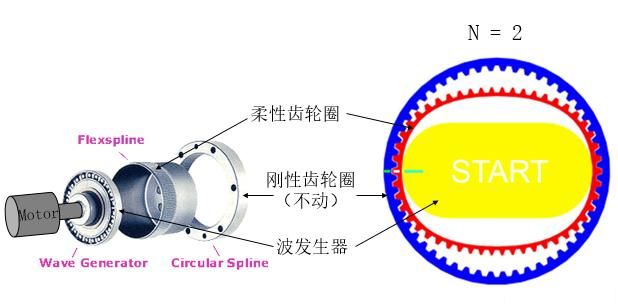
谐波齿轮减速器是利用行星齿轮传动原理发展起来的一种新型减速器,由波发生器、柔轮和刚轮组成,依靠波发生器使柔轮产生可控弹性变形,并靠柔轮与刚轮啮合来传递运动和动力。
谐波传动具有运动精度高,传动比大、质量小、体积小、较小的传动惯量等优点。最重要的是能在密闭空间传递运动,这一点是其他任何物理运动没办法实现的。其缺点为在谐波齿轮传动中柔轮每转发生两次椭圆变形,极易引起材料的疲劳损坏,损耗功率大。同时,其引起的扭转变形角达到20’一30’甚至更大。受轴承间隙等影响可能会导致3 7~6’的回程误差,不具有自锁功能。
RV减速器由一个行星齿轮减速机的前级和一个摆线针轮减速机的后级组成。RV传动是新兴起的一种传动,它是在传统针摆行星传动的基础上发展出来的,不仅克服了一般针摆传动的缺点,而且具有体积小、质量轻、传动比范围大、寿命长、精度保持稳定、效率高、传动平稳等一系列优点。
RV减速器有较优越的性能:①摆线针轮行星减速装置中的传动零件刚度高、接触应力小,零件加工和安装精度易于实现高精度,这就使得摆线针轮传动的效率很高;②行星传动结构与紧凑的w输出机构组合,使整个摆线针轮减速装置结构十分紧凑,因此其结构体积小和质量轻;③采用一齿差或少齿差传动,摆线针轮传动的传动比大小取决于摆线针轮的齿数,齿数越多,传动比越大;④摆线针轮传动同时啮合的齿数要比渐开线外齿传动同时啮合的齿数多,因此承载能力较大;⑤摆线轮和针轮的轮齿均淬硬、精磨,比渐开线少齿差传动中内齿轮的加工性能更好、齿面硬度更高,常规使用的寿命更长。

机器人本体厂商的工作主要是生产机器人本体,负责机器人关键零部件生产、控制算法、开发环境设计等工作。
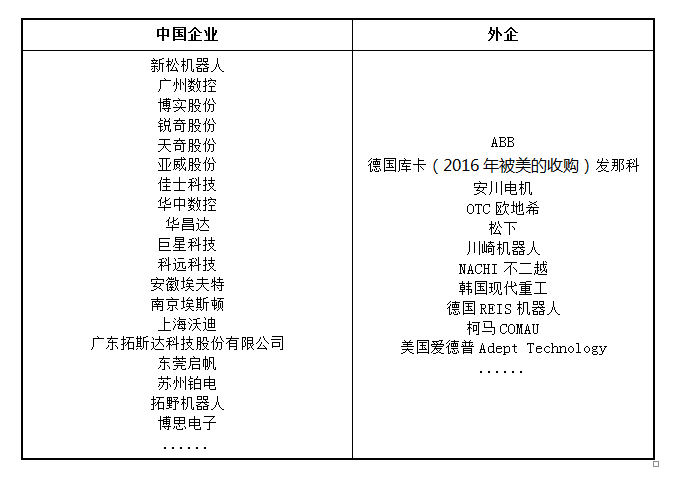
我国工业机器人与欧美日之间的差距依然明显。目前工业机器人“四大家族”(ABB、库卡、发那科、安川)为全球主要的工业机器人供应商,占据全球约50%的市场占有率。占据了中国市场60%的份额,而国内自主品牌占比不到10%。

其他世界知名的工业机器人企业还有Kawasaki川崎重工业公司、Epson爱普生机器人公司、Staubli史陶比尔机器人、NachiFujikoshi那智机器人、Comau柯马机器人公司、Adept爱德普机器人公司以及中国的新松机器人公司。
从2013年起,中国连续四年成为全世界最大的工业机器人市场,据国际机器人联合会IFR的报告,2016年,中国工业机器人销量9万台,同比增长31%,约占全球销量的1/3。目前,中国的机器人制造商正在扩大其在国内市场的份额,2018年~2020年,中国机器人的年销售量预计每年平均增长15%~20%。
据统计,2017年1-9月,中国工业机器人产量达到95351台(套),同比增长69.4%,9月当月产量为13085台(套),比上年同月增长103.2%,继续保持快速地增长态势。
从产业链角度看,位于工业机器人产业链上的企业依次是机器人单元产品制造商、机器人系统集成商和工业自动化集成商。现在,欧美、日本等一些国际工业机器人公司,在中国不直接提供机器人自动化系统的集成服务,而是将机器人单体销售给系统集成商,由系统集成商再对终端用户。
目前,国内的机器人企业多为系统集成商。根据国际经验来看,国内的机器人产业高质量发展更接近于美国模式,即以系统集成商为主,单元产品外购或贴牌,为客户提供交钥匙工程。与单元产品的供应商相比,系统集成商还要具有产品设计能力、项目经验,并在对用户行业深刻理解的基础之上,提供可适应任何不同应用领域的标准化、个性化成套装备。
工业机器人的大规模普及将为国内相关系统集成商带来发展机遇。中国机器人产业化模式较可行的是从集成起步至成熟阶段采用分工模式:即美国模式(集成)-日本模式(核心技术)-德国模式(分工合作)。
作为中国机器人市场上的主力军,系统集成商普遍规模较小,年产值不高,面临强大的竞争压力。从相关市场数据分析来看,现阶段国内集成商规模都不大,出售的收益1个亿以下的企业占大部分,能做到5个亿的就是行业的佼佼者,10个亿以上的全国范围屈指可数。从国内机器人市场发展现状看,有两类企业将在未来行业****展的背景中胜出:一类是有很强研发技术底蕴,项目经验比较丰富的行业企业,另一类是在某些行业有一定的项目经验,拟在自身行业推广工业机器人的企业。
同时,产业借助资本的力量,企业通过IPO持续不断的发展壮大,其中汇川技术、埃斯顿等优质企业在伺服技术方面走在行业前列,慈星股份、新时达等在工业机器人控制器方面较早布局,中大力德、双环传动等有代表性的公司涉足减速机;机器人、黄河旋风、拓斯达、埃斯顿、博实股份、天奇股份等一批公司慢慢的变成为工业机器人集成应用领域的佼佼者。
尽管前路艰难,但大国崛起之路上,工业机器人的进口替代已是大势所趋。随技术突破的推进,国内逐渐涌现出一批快速成长的制造企业,中国工业机器人产业正向中高端发起冲锋。
*博客内容为网友个人发布,仅代表博主个人自己的观点,如有侵权请联系工作人员删除。


